Current Research Topics
Robotic Perception and Manipulation of Deformable Linear Objects
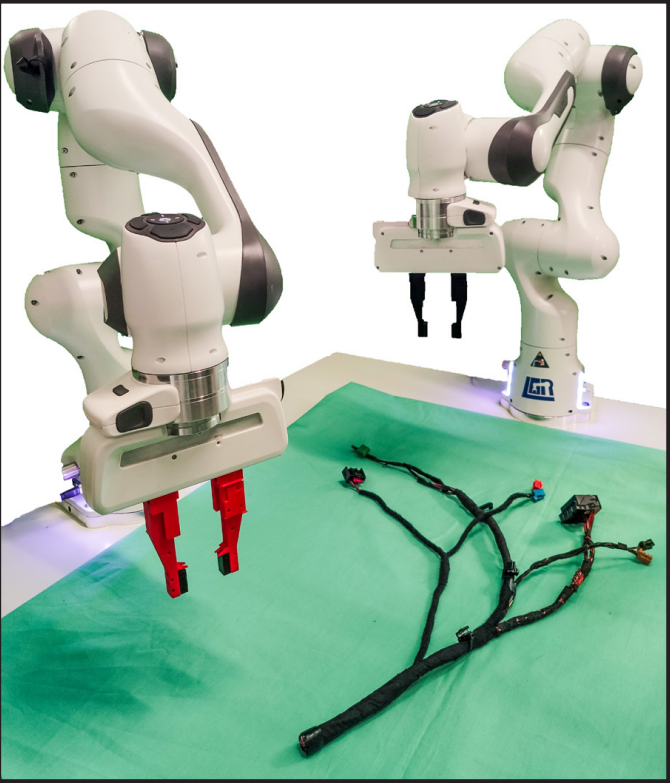
Deformable Linear Objects (DLOs) are a specific subset of Deformable Objects (DOs), i.e. objects that can change their shape when subjected to external forces. DLOs are characterized by a linear geometry and include examples such as wires, cables, strings, and ropes. Despite being common in both domestic and industrial environments, DLOs pose a significant challenge for robotic applications. Indeed, the manufacturing and assembly industries that work with wires and wiring harnesses still rely heavily on human labor. The main challenges that robots face when dealing with these objects are: (1) the lack of any specific shape or feature that distinguishes them from other objects; (2) the vast number of possible configurations they can assume; and (3) their highly nonlinear and complex dynamics, which are generally difficult to model and predict. At LAR, we are actively researching approaches to effectively perceive DLOs using deep learning methods, while also developing smart strategies to enable the automatic generation of training datasets. For the robotic manipulation, our focus is on combining both model-based and learning-based approaches, with the aim of addressing some of their individual limitations.

Robotic Manipulation of Liquids in Open Containers
[in progress]

Electromyographic interfaces for Controlling Robotic Devices
[in progress]

Robot Learning with Physical Energy Awareness
[in progress]
Past Research Topics
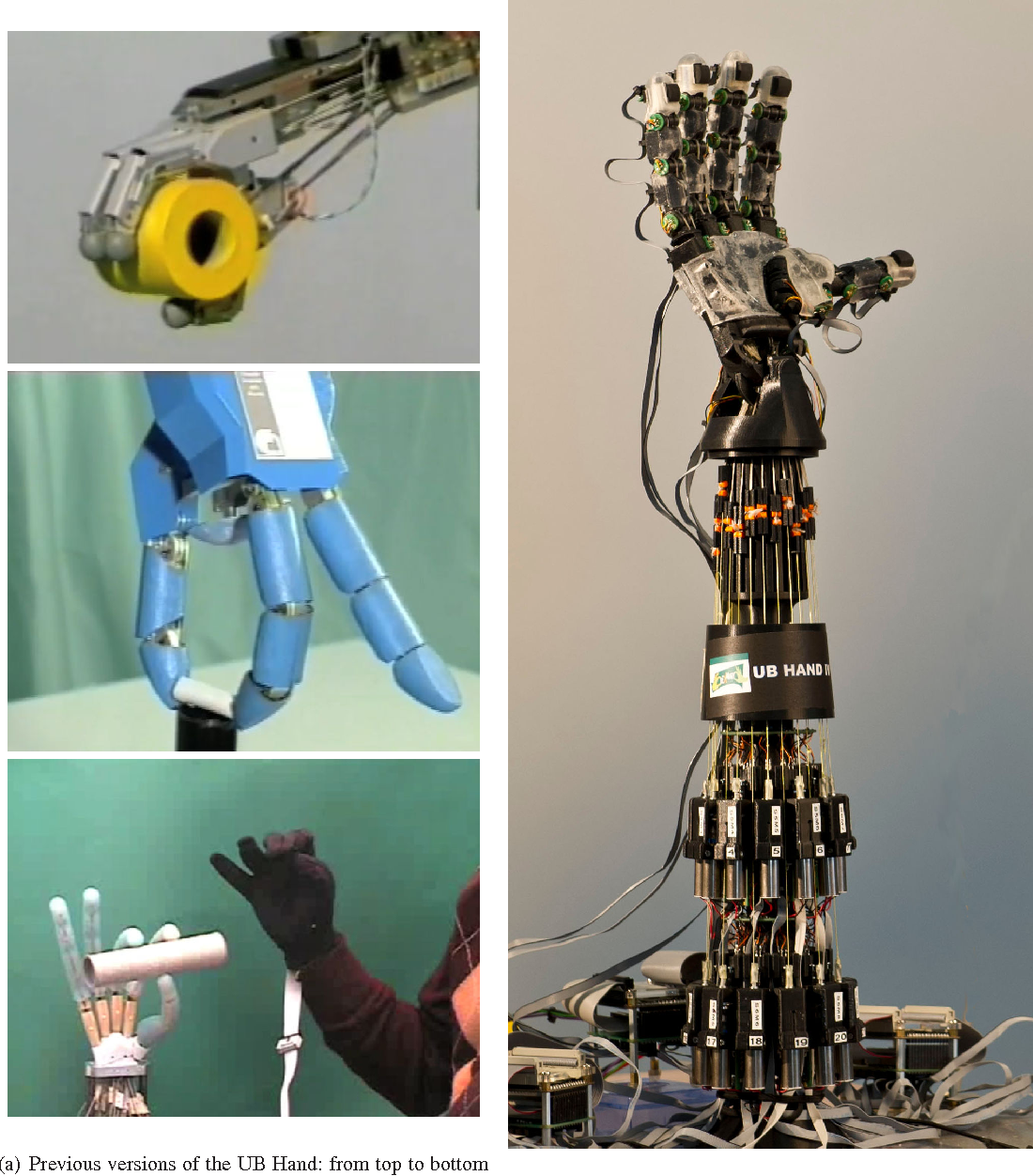
Design and control of anthropomorphic robot hands
[in progress]